GOTI
I'm a Robotics Engineer working on autonomous systems. How robots perceive their environment, estimate where they are, plan where to go, and execute reliably when things don't go as planned.
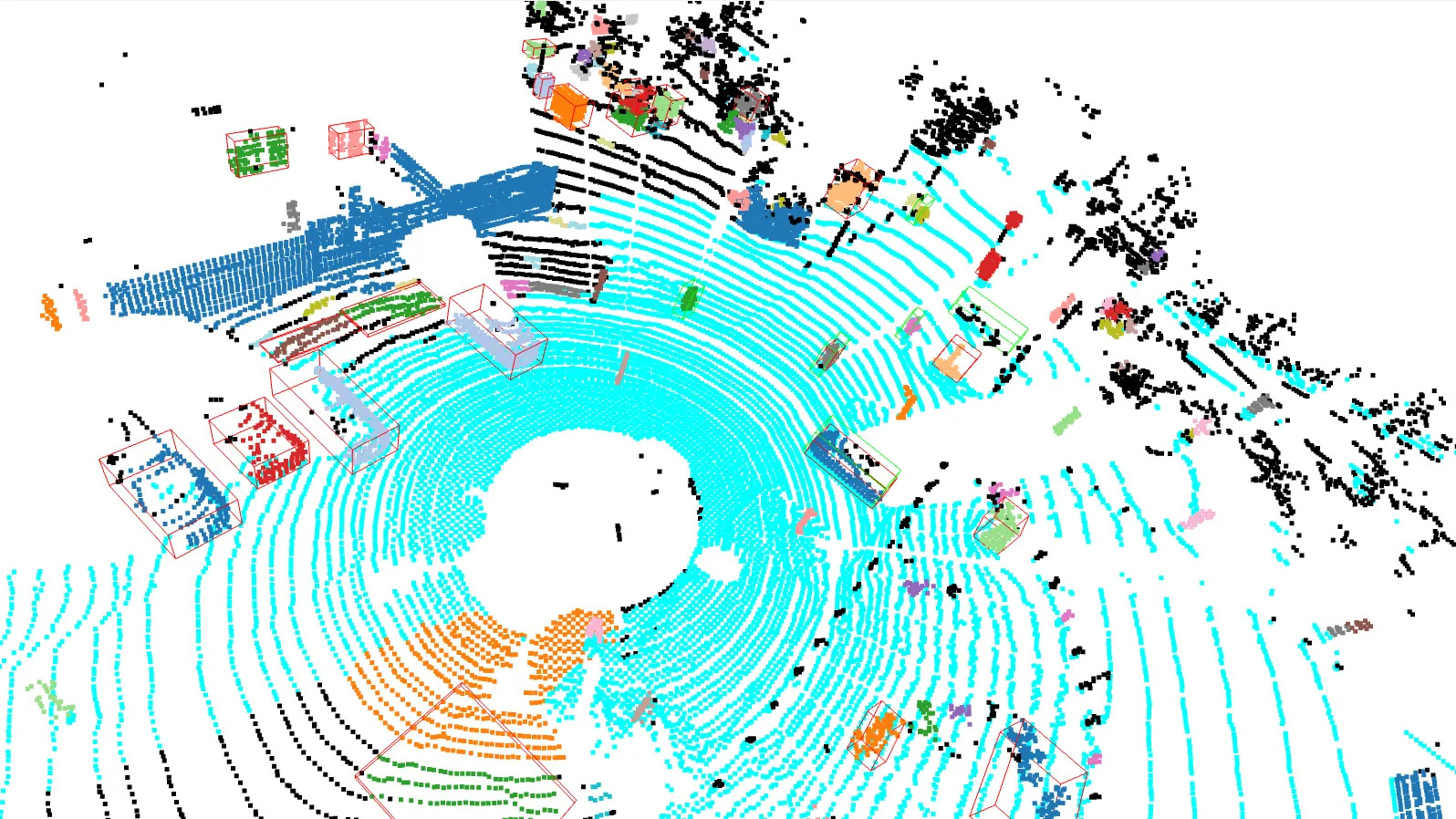
At Texas A&M, my work spans SLAM pipelines, RL based planners for drones and robotic arms, LiDAR camera fusion, and safe autonomous navigation. The thread connecting all of it is the same question: how do you build a system that holds up outside the lab?
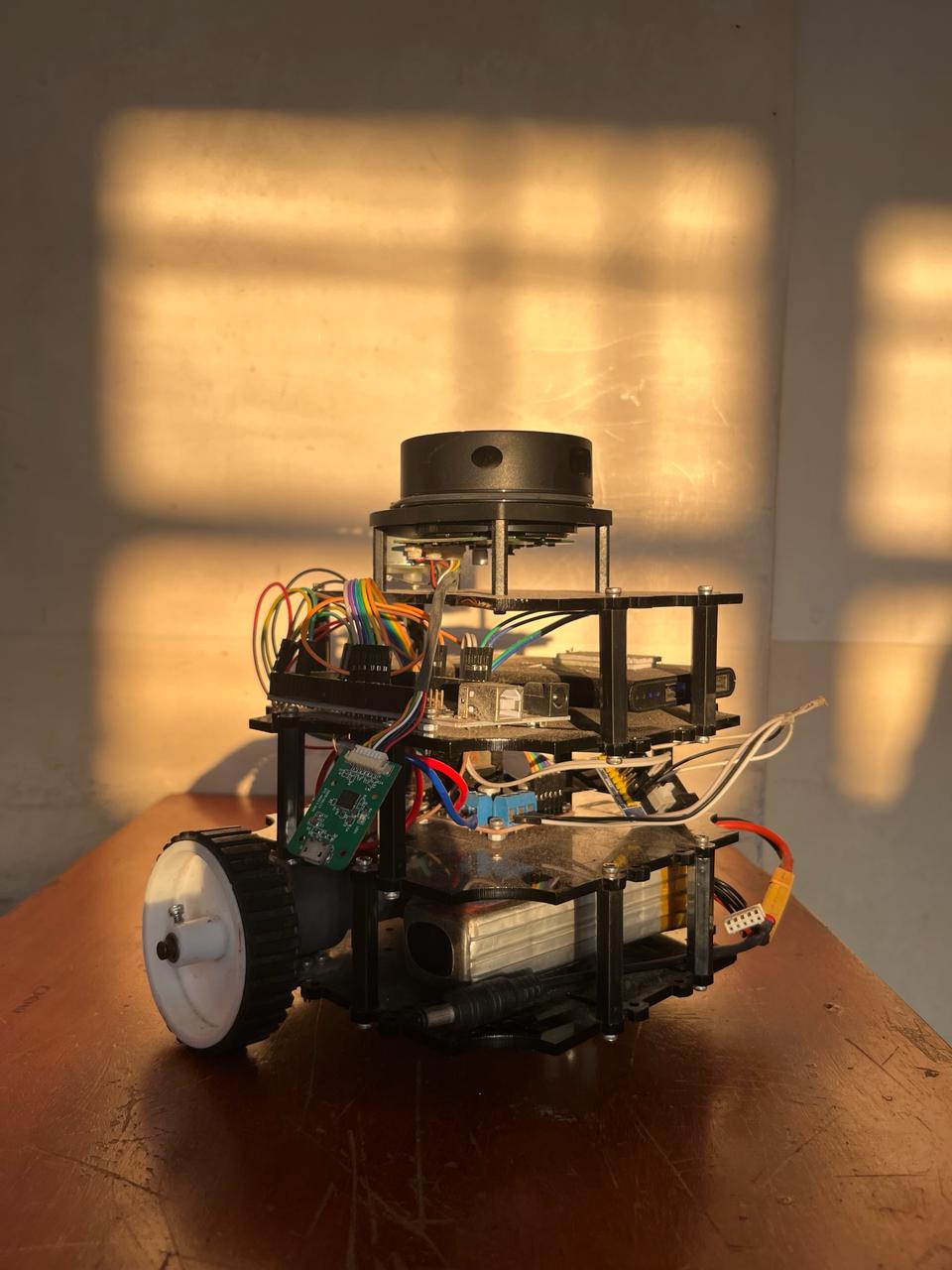
Before grad school, I spent four years at NIT Karnataka building robots for ABU Robocon. I started as a programmer on the electronics team and finished as Vice Captain, leading a 40 person team through a full competition cycle. That experience taught me that the gap between a robot that works and one that doesn't is almost never the algorithm.
When I'm away from the lab, I'm usually on a trail. I trek, I photograph, and I document places. The same instinct to observe carefully and bring something back, just applied to mountains instead of sensor data.
- Received Indian Academy of Science Summer Research Fellowship.
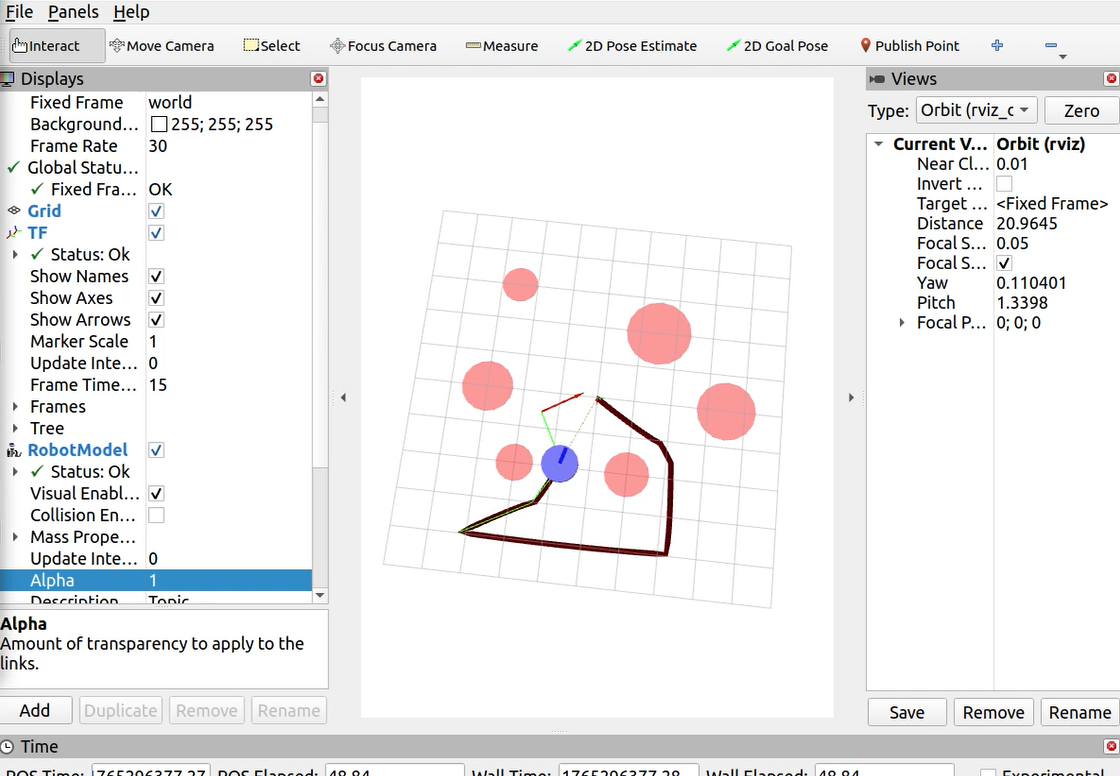
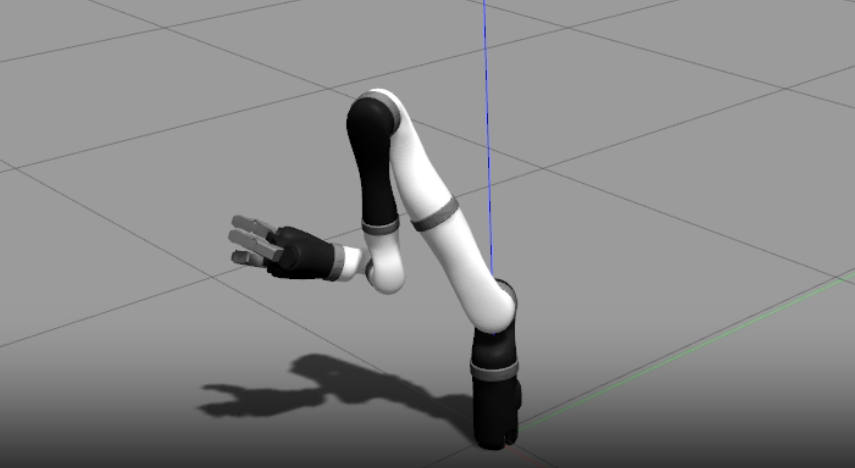
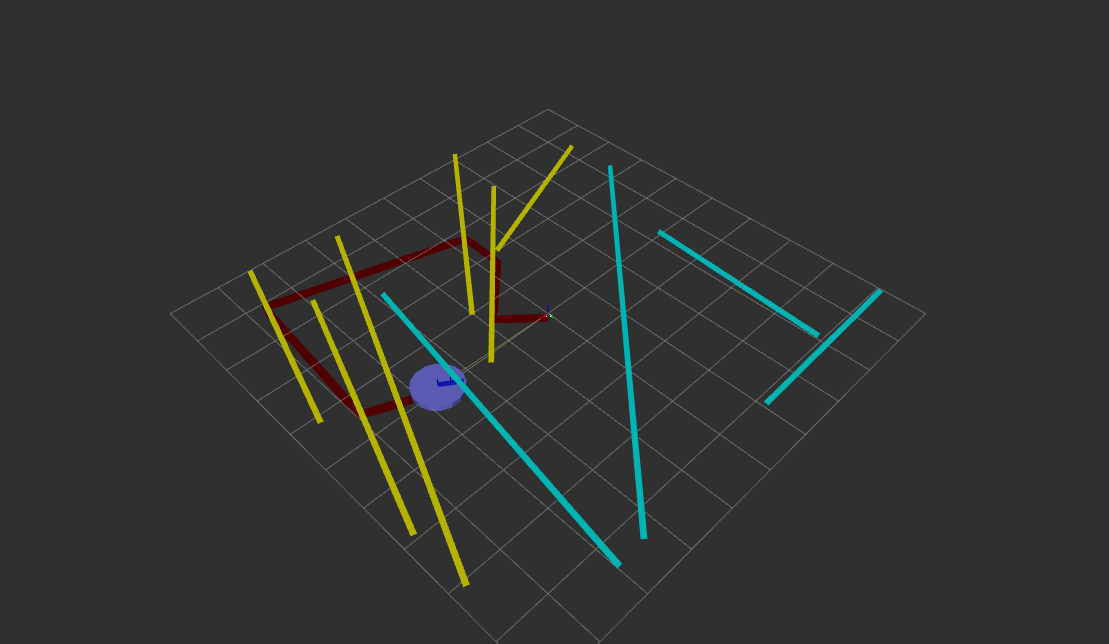
- Developed a PPO-based DRL trajectory planner for a 7-DOF robotic arm enabling collision-aware, smooth goal-directed motion in continuous state-action spaces.
- Evaluated learned policies using reward convergence, target accuracy, and trajectory smoothness metrics.

Vice Captain — CSD Robocon NITK




